水下应急探捞机械手由一个机械手爪(单/双/三功能)、一台水下摄像机、一个水下照明灯、一个便携录像机、一个7英寸显示屏、一组接驳探杆(总长15米)和一个可充电电池组组成。如果需要在水下较大距离搜索,可增配成像声纳。其中便携录像机、可充电电池组挂于腰带上,机械手爪、水下摄像机、水下照明灯安装在探杆上伸入水下,显示屏固定在探杆水面端供操作者观看水下场景,适用于小范围较浅水域沉没物无潜水员的打捞。

主要参数:
体积:702mm x 689mm x 300mm(不含机械手长度);
重量:约40kg;
推进器:8个,垂直最大推力:约20kg,水平各方向最大推力:约14kg;
摄像机:2个(前1后1),每个分辨率:1920*1080;
照明灯:4个,每个光通量:3000Lum;
前视声纳:1个,用于避障、环境观察、目标搜寻;
深度传感器:1个;
机械手:1个,最大直径:170mm,最大握力:20kg,最大可提重量:70kg;
电池工作时长:约3小时(提供多速度模式,低速下可操作更久);
最大工作深度:300米;
最大航行速度:约2节(可根据需求提高航速);
缆车:1台,含脐带缆(≤300米);
水面主机:1台;
其他:可根据应用需要定制并集成各类配件或附属传感器。

特性:
ROV整体可6自由度操控:沉浮、进退、平移、转向、俯仰、横滚;
手爪可2自由度操控:闭合、旋转;
自动功能:定深、定向;
可对水下图像进行实时增强。
原图

增强

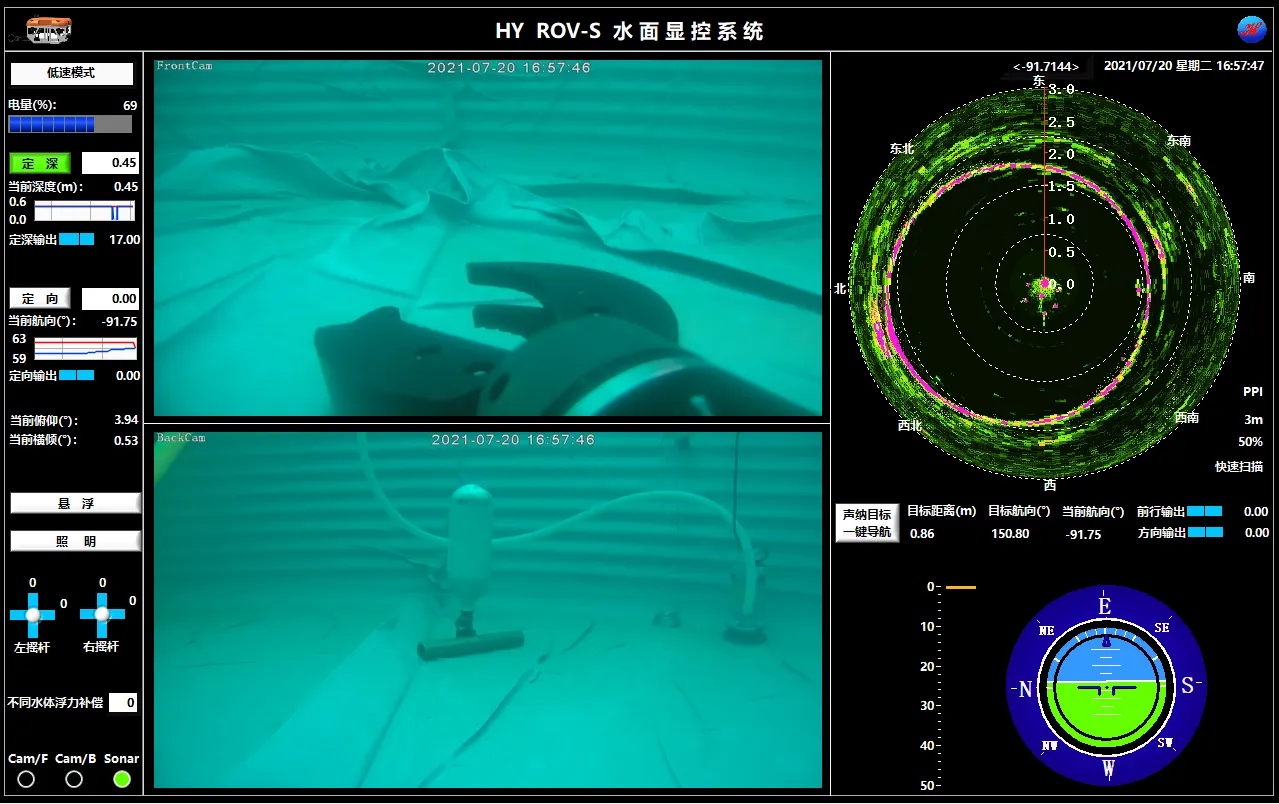
ROV显控界面
显控界面集中展示所有信息:前后双摄画面,声纳扫描画面,姿态航向及深度、ROV定深定向等状态。
ROV入水-救捞-出水过程视频示意
主要参数:
体积:702mm x 689mm x 300mm(不含机械手长度);
重量:约40kg;
推进器:8个,垂直最大推力:约20kg,水平各方向最大推力:约14kg;
摄像机:2个(前1后1),每个分辨率:1920*1080;
照明灯:4个,每个光通量:3000Lum;
前视声纳:1个,用于避障、环境观察、目标搜寻;
深度传感器:1个;
机械手:1个,最大直径:170mm,最大握力:20kg,最大可提重量:70kg;
电池工作时长:约3小时(提供多速度模式,低速下可操作更久);
最大工作深度:300米;
最大航行速度:约2节(可根据需求提高航速);
缆车:1台,含脐带缆(≤300米);
水面主机:1台;
其他:可根据应用需要定制并集成各类配件或附属传感器。
特性:
ROV整体可6自由度操控:沉浮、进退、平移、转向、俯仰、横滚;
手爪可2自由度操控:闭合、旋转;
自动功能:定深、定向;
可对水下图像进行实时增强。
原图
增强
ROV显控界面
显控界面集中展示所有信息:前后双摄画面,声纳扫描画面,姿态航向及深度、ROV定深定向等状态。
ROV入水-救捞-出水过程视频示意



















